今回はJetson nanoでPWM(Pulse Width Modulation)制御をするまでの手順をまとめてく。
Jetson nanoでPWMのPinは「32, 33」の二つ。
これを使ってサーボモータをマルチスレッドで二つ動かす。
目次
1. 配線図
2. Jetson nanoでGPIOのインストール
3. PWM設定-「Jetson-IO tool」の実行
4. PIN番号を合わせる
5. PWMでサーボモータを制御
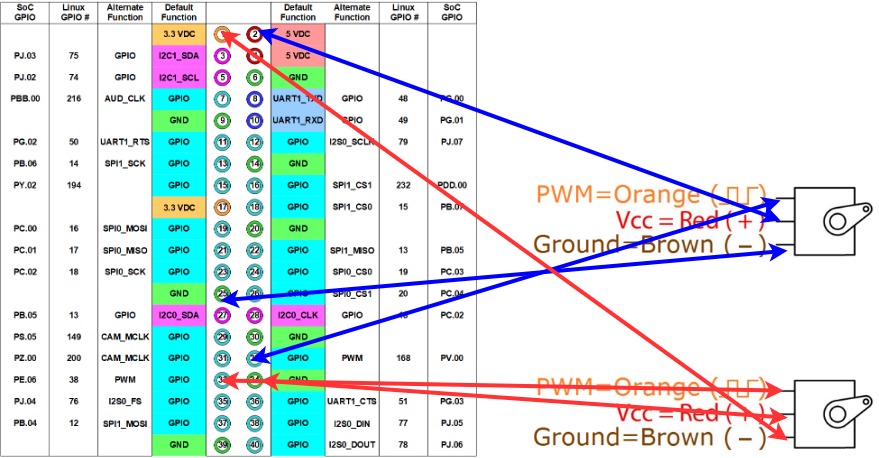
1.配線図
Jetson nanoの40 PINs(サーボモータの配線は3つあってそれぞれ、PWMとGNDと電圧V。)
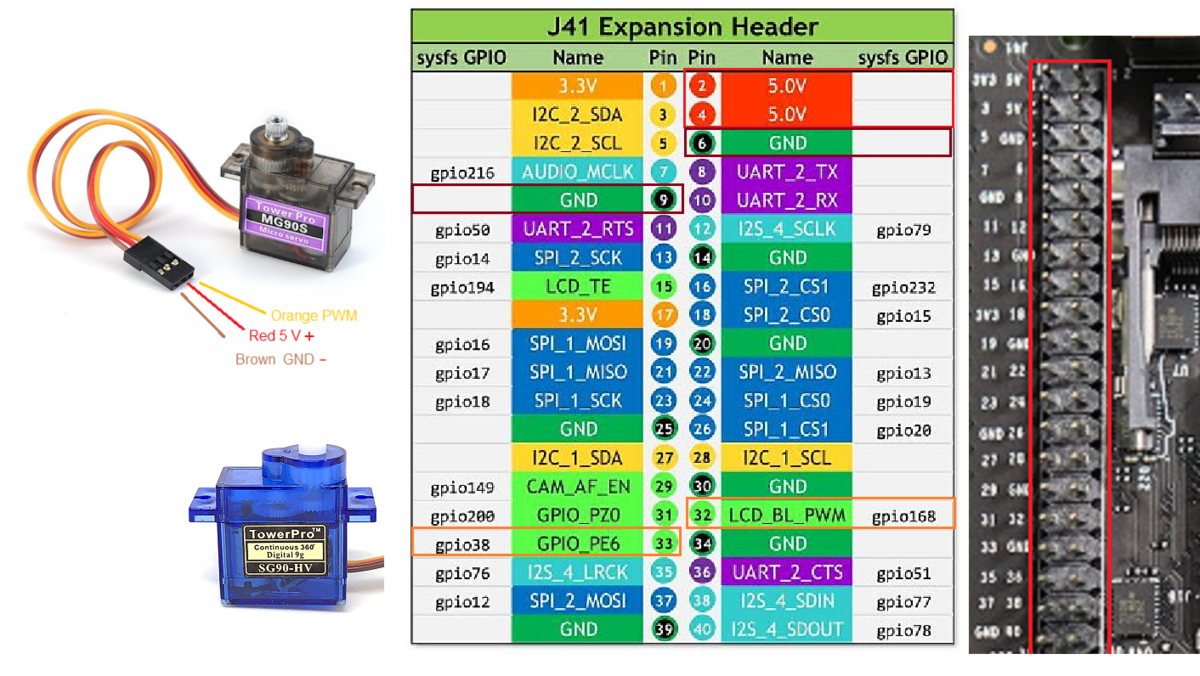
Jetson nanoとサーボモータ(SG-5010)の配線図。
2 Jetson nanoでGPIOのインストール
PWM用のGPIOをインストール。$ git clone https://github.com/NVIDIA/jetson-gpio.git $ cd jetson-gpio $ sudo python3 setup.py install # グループ作成とユーザーの追加 $ sudo groupadd -f -r gpio $ sudo usermod -a -G gpio <ユーザー名> # udevルールの追加と反映 $ sudo cp lib/python/Jetson/GPIO/99-gpio.rules /etc/udev/rules.d/ $ sudo udevadm control --reload-rules && sudo udevadm trigger # 再起動して使えるようにする $ sudo reboot
3 PWM設定-「Jetson-IO tool」の実行
Jetson nanoにあるPINを外部ピンへ拡張する。
$ sudo /opt/nvidia/jetson-io/jetson-io.py
「Jetson Expansion Header Tools」でpwm0, pwm2を選択
「save and reboot to reconfigure pins」で再起動して反映。
| Select desired functions (for pins): | | | | [ ] aud_mclk (7) | | [ ] i2s4 (12,35,38,40) | | [*] pwm0 (32) | | [*] pwm2 (33) | | [ ] spi1 (19,21,23,24,26) | | [ ] spi2 (13,16,18,22,37) | | [ ] uartb-cts/rts (11,36) |
****jetson-io.py実行時に一瞬、画面に何かが表示されて直ぐに終了してしまう場合
DTB ファイルが /boot ディレクトリ配下に存在しているので、/boot/dtb ディレクトリを作成して、その中にコピー。
cd /boot
sudo mkdir dtb
sudo cp *.dtb* dtb/
再度
$ sudo /opt/nvidia/jetson-io/jetson-io.py
PWMが設定できてるなら下の様にpwm-0, pwm-2がnullになる
$ sudo cat /sys/kernel/debug/pwm >>>>>> platform/70110000.pwm, 1 PWM device pwm-0 (pwm-regulator ): requested enabled period: 2500 ns duty: 0 ns polarity: normal platform/7000a000.pwm, 4 PWM devices pwm-0 ((null) ): period: 0 ns duty: 0 ns polarity: normal pwm-1 (pwm-regulator ): requested enabled period: 8000 ns duty: 1440 ns polarity: normal pwm-2 ((null) ): period: 0 ns duty: 0 ns polarity: normal pwm-3 (pwm-fan ): requested enabled period: 45334 ns duty: 0 ns polarity: normal
4. PIN番号を合わせる
Jetson Nanoでは普通に40PINを拡張しただけではサーボモータが動かない。
サーボモータが動くようにするにはさらに設定が必要で一番苦労したところ。
# assign Pin32 to PWM0 $ busybox devmem 0x700031fc 32 0x45 $ busybox devmem 0x6000d504 32 0x2 # assign Pin33 to PWM2 $ busybox devmem 0x70003248 32 0x46 $ busybox devmem 0x6000d100 32 0x00 $ cd /sys/devices/7000a000.pwm/pwm/pwmchip0 # Control Pin 32 of PWM0 echo 0 > export echo 20000000 > pwm0/period echo 2500000 > pwm0/duty_cycle echo 1 > pwm0/enable # Control Pin33 of PWM2 echo 2 > export echo 20000000 > pwm2/period echo 1500000 > pwm2/duty_cycle echo 1 > pwm2/enable
設定したらサーボモータが動いた。
・参考記事
5 PWMでサーボモータを制御
1つのサーボモータを動かす
import RPi.GPIO as GPIO import time output_pins = { 'JETSON_XAVIER': 18, 'JETSON_NANO': 32, 'JETSON_NX': 33, 'CLARA_AGX_XAVIER': 18, 'JETSON_TX2_NX': 32, 'JETSON_ORIN': 18, } output_pin = output_pins.get(GPIO.model, None) if output_pin is None: raise Exception('PWM not supported on this board') def main(): # Pin Setup: # Board pin-numbering scheme GPIO.setmode(GPIO.BOARD) # set pin as an output pin with optional initial state of HIGH GPIO.setup(output_pin, GPIO.OUT, initial=GPIO.HIGH) p = GPIO.PWM(output_pin, 50) val = 7.25 incr = 0.25 p.start(val) print("PWM running. Press CTRL+C to exit.") try: while True: time.sleep(1) if val >= 12: incr = -incr if val <= 2.5: incr = -incr val += incr p.ChangeDutyCycle(val) finally: p.stop() GPIO.cleanup() if __name__ == '__main__': main()
マルチスレッドで2つのサーボモータを動かす
#!/usr/bin/env python import Jetson.GPIO as GPIO import time import threading import sys from formura import Angle2Duty OUTPUT_PIN1 = 32 OUTPUT_PIN2 = 33 CYCLE = 50 t=2 def setup_device(): GPIO.setmode(GPIO.BOARD) GPIO.setup(OUTPUT_PIN1, GPIO.OUT, initial=GPIO.HIGH) pw = GPIO.PWM(OUTPUT_PIN1, CYCLE) GPIO.setup(OUTPUT_PIN2, GPIO.OUT, initial=GPIO.HIGH) ph = GPIO.PWM(OUTPUT_PIN2, CYCLE) return pw, ph def pw_loop(pw): while flag: dc1 = Angle2Duty(450) pw.start(dc1) print("width dc {}".format(dc1)) time.sleep(t) dc2 = Angle2Duty(500) pw.start(dc2) print("width dc {}".format(dc2)) time.sleep(t) dc3 = Angle2Duty(410) pw.start(dc3) print("width dc {}".format(dc3)) time.sleep(t) dc4 = Angle2Duty(300) pw.start(dc4) print("width dc {}".format(dc4)) time.sleep(t) def ph_loop(ph): while flag: dc1 = Angle2Duty(120) ph.start(dc1) print("ph height {}".format(dc1)) time.sleep(t) dc2 = Angle2Duty(180) ph.start(dc2) print("ph height {}".format(dc2)) time.sleep(t) dc3 = Angle2Duty(240) ph.start(dc3) print("ph height {}".format(dc3)) time.sleep(t) dc4 = Angle2Duty(170) ph.start(dc4) print("ph height {}".format(dc4)) time.sleep(t) if __name__ == '__main__': flag = True c=0 pw, ph = setup_device() th1 = threading.Thread(target=pw_loop, args=(pw,)) th1.start() th2 = threading.Thread(target=ph_loop, args=(ph,)) th2.start() while True: c +=1 if c==3000: flag =False th1.join() th2.join() pw.stop() ph.stop() GPIO.cleanup() sys.exit(1)
参考記事
・JetPack 4.3 (r32.3.1) で追加された Jetson-IO tool を使用して Pinmux テーブルを設定してみた。・Jetson Nano の 2 つのハードウェア PWM を使用してみた
・Jetson Nano の GPIO にサーボモータをつないで制御してみる