本来は、lidarで取得するpcd(点群データ)をdepth画像から作成する手順。
理由はlidarからだと綺麗なpcdが撮影できない感じがしたから。
なのでdepth画像とrgb画像を合わせてpcdを作ることにした。
目次
1. lidarから直接pcdを作成する
2. depth画像とrgb 画像からpcdを作成する
3. PCLで両方のpcdを比較してみる
1. lidarから直接pcdを作成する
pcd(点群データ)のtopic名は/camera/depth/color/points。
まず、lidarで表示。
pcdをlidarに表示させるのは普通にlaunchする時に、filters:=pointcloudを引数にとる。
# 方法1:引数にfilters:=pointcloudをつける $ roslaunch realsense2_camera rs_camera.launch filters:=pointcloud # 方法2: lidarの点群データ表示用 launchファイル $ roslaunch realsense2_camera demo_pointcloud.launch # 画像で確認しながらbagファイルを作成 $ rosrun image_view image_view image:=/camera/color/image_raw # rosbagに点群データを保存 ($ rosbag record -O [保存ファイル名] [topic名1, 2]) $ rosbag record -O /home/parallels/place/pcd.bag /camera/depth/color/points ### [ INFO] [1647787126.439056879]: Subscribing to /camera/depth/color/points ### [ INFO] [1647787126.441952051]: Recording to '/home/parallels/place/pcd.bag' # rosbagの情報 $ rosbag info pcd.bag ### 〜 ### types: sensor_msgs/PointCloud2 [1158d486dd51d683ce2f1be655c3c181] ### topics: /camera/depth/color/points 255 msgs : sensor_msgs/PointCloud2
bagからpcdを作成
# rosrun pcl_ros bag_to_pcd <input_file.bag> <topic> <output_directory> $ roscore $ rosrun pcl_ros bag_to_pcd pcd.bag /camera/depth/color/points /home/parallels/place/pcds ### /color/points with the following fields: x y z rgb ### Data saved to /home/parallels/place/pcds/1647787135.031567812.pcd
pcdファイルが保存先フォルダに山のように保存される。
$ du -k 1647787135.031567812.pcd ### 1556 1647787135.031567812.pcd
1ファイル1MBを超えるのでなかなか重い
2. depth画像とrgb 画像からpcdを作成する
depth画像とrgb画像の作成は過去記事参照。depth画像とrgb画像をペアで一つのpcdファイルを作成する。
ライブラリはopen3Dというのを使う。
セットアップ
$ pip3 install open3d $ catkin_create_pkg pcd_create roscpp rospy std_msgs cv_bridge image_transport message_generation $ sudo vi CMakeLists.txt $ cd ~/catkin_ws && catkin_make
CMakeLists.txt(以下を追記)
find_package(PCL 1.8 REQUIRED) include_directories( include ${catkin_INCLUDE_DIRS} ${PCL_INCLUDE_DIRS} ) add_executable(vccs src/vccs.cpp ) target_link_libraries(vccs ${catkin_LIBRARIES} ${PCL_LIBRARIES} )
depth画像とrgb画像からpcdの作成
$ roslaunch realsense2_camera rs_camera.launch filters:=pointcloud # 画像で確認しながらbagファイルを作成 $ rosrun image_view image_view image:=/camera/color/image_raw # depthとRGBのtopic名を指定 $ rosbag record -O /home/parallels/place/depth.bag /camera/color/image_raw /camera/depth/image_rect_raw ### [ INFO] [1647786652.575961747]: Subscribing to /camera/color/image_raw ### [ INFO] [1647786652.582693138]: Subscribing to /camera/depth/image_rect_raw ### [ INFO] [1647786652.586763715]: Recording to '/home/parallels/place/depth.bag'.
# bagファイルをdepth画像とrgb画像に変換 $ python3 rosbag2depth.py # depthとrgbからpcdの作成 $ python3 depth2pcd.py
結果(RGB/depth)
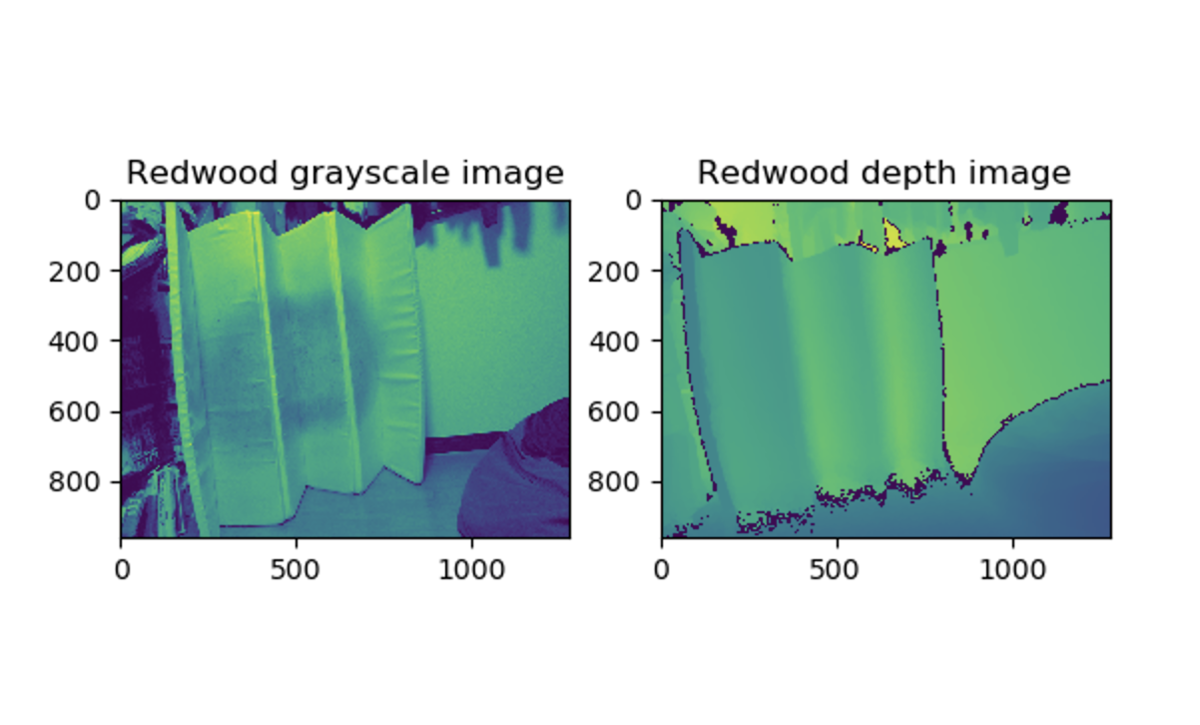
作成したPCD
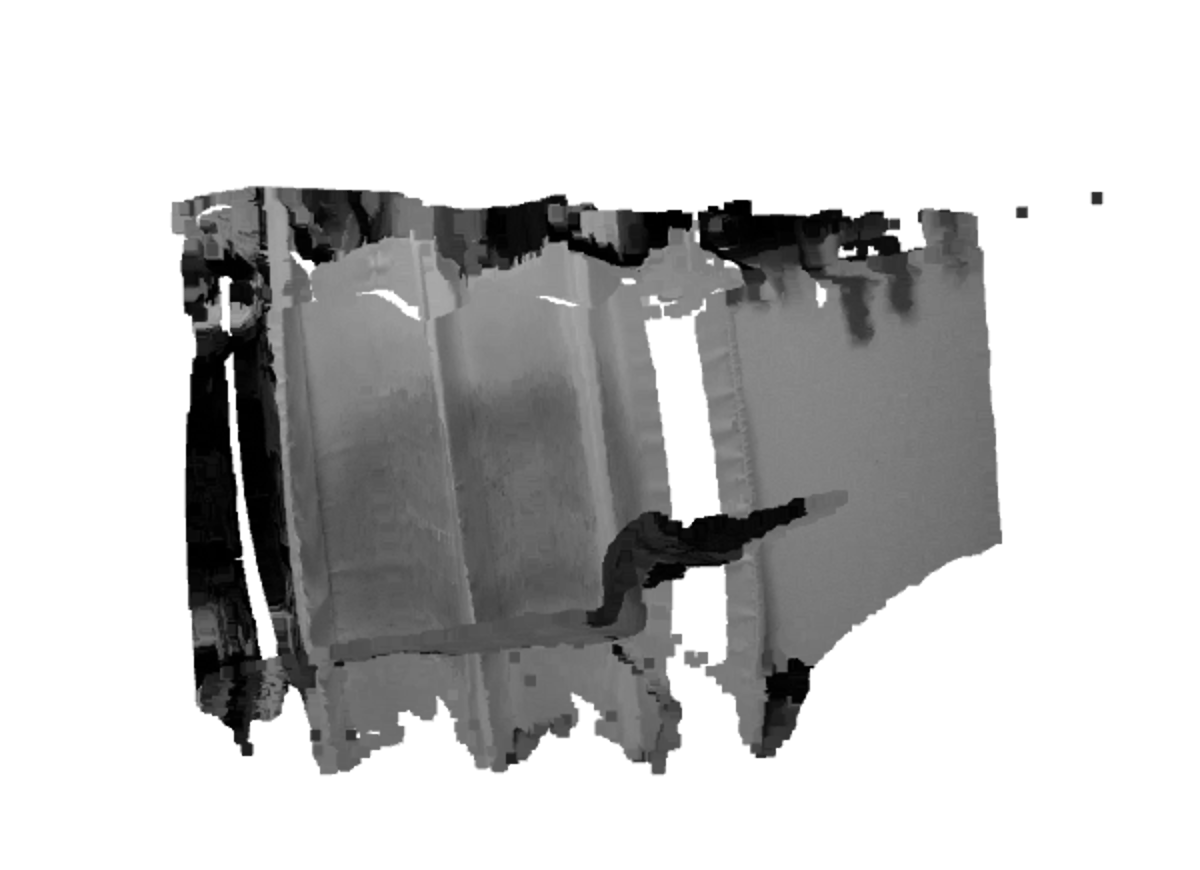
import open3d as o3d import matplotlib.pyplot as plt import os def main(out_dir, plot=False): color_raw = o3d.io.read_image(os.path.join(out_dir, "rgb/frame000001.jpg")) depth_raw = o3d.io.read_image(os.path.join(out_dir, "depth/frame000000.png")) rgbd_image = o3d.geometry.RGBDImage.create_from_color_and_depth( color_raw, depth_raw) if plot: plt.subplot(1, 2, 1) plt.title('Redwood grayscale image') plt.imshow(rgbd_image.color) plt.subplot(1, 2, 2) plt.title('Redwood depth image') plt.imshow(rgbd_image.depth) plt.show() pcd = o3d.geometry.PointCloud.create_from_rgbd_image( rgbd_image, o3d.camera.PinholeCameraIntrinsic( o3d.camera.PinholeCameraIntrinsicParameters.PrimeSenseDefault)) # Flip it, otherwise the pointcloud will be upside down pcd.transform([[1, 0, 0, 0], [0, -1, 0, 0], [0, 0, -1, 0], [0, 0, 0, 1]]) o3d.visualization.draw_geometries([pcd]) o3d.io.write_point_cloud(os.path.join(out_dir, "open3d.pcd"), pcd) if __name__ == "__main__": out_dir = '/home/parallels/place' main(out_dir, plot=True)
3. PCLで両方のpcdを比較してみる
pclチュートリアルにあるクラスタリング(SupervoxelClustering)でpcdの出来を確認してみる。pcl::SupervoxelClusteringを使用するとpointcloudを複数のsupervoxel clustersに分割できる
XYZ座標系の情報
| コード | 説明 |
|---|---|
| PointXYZ | 点群3D位置情報のみ取得 |
| PointXYZRGB | 点群3Dの位置情報にRGBの色をつけて取得 |
| PointXYZRGBA | 点群3D位置情報にRGBAの色情報をつけて取得(Aは透明度Alpha) |
| PointXYZI | 点群3D位置情報に輝度の色情報をつけて取得 |
PCLで確認してみる
Lidarから取得したPCD
$ rosrun pcd_create vccs /home/usr/pcd/1647790156.662197590.pcd
depthとrgbから作成したPCD
$ rosrun pcd_create vccs /home/usr/open3d.pcd
直接Lidarから取得した方出来がいいようだ。
実例でもdepthから作ってるの聞いたことないし、直接撮影した方が綺麗にできそう。PCDのテクはまだ不明なことが多い。
確認用スクリプト(src/vccs.cpp)
#include <pcl/console/parse.h> #include <pcl/point_cloud.h> #include <pcl/point_types.h> #include <pcl/io/pcd_io.h> #include <pcl/visualization/pcl_visualizer.h> #include <pcl/segmentation/supervoxel_clustering.h> //VTK include needed for drawing graph lines #include <vtkPolyLine.h> // Types typedef pcl::PointXYZRGBA PointT; typedef pcl::PointCloud<PointT> PointCloudT; typedef pcl::PointNormal PointNT; typedef pcl::PointCloud<PointNT> PointNCloudT; typedef pcl::PointXYZL PointLT; typedef pcl::PointCloud<PointLT> PointLCloudT; void addSupervoxelConnectionsToViewer (PointT &supervoxel_center, PointCloudT &adjacent_supervoxel_centers, std::string supervoxel_name, pcl::visualization::PCLVisualizer::Ptr & viewer); int main (int argc, char ** argv) { if (argc < 2) { pcl::console::print_error ("Syntax is: %s <pcd-file> \n " "--NT Dsables the single cloud transform \n" "-v <voxel resolution>\n-s <seed resolution>\n" "-c <color weight> \n-z <spatial weight> \n" "-n <normal_weight>\n", argv[0]); return (1); } //////////// pcd input as process 1 //////////// PointCloudT::Ptr cloud (new PointCloudT); pcl::console::print_highlight ("Loading point cloud...\n"); if (pcl::io::loadPCDFile<PointT> (argv[1], *cloud)) { pcl::console::print_error ("Error loading cloud file!\n"); return (1); } bool disable_transform = pcl::console::find_switch (argc, argv, "--NT"); float voxel_resolution = 0.008f; bool voxel_res_specified = pcl::console::find_switch (argc, argv, "-v"); if (voxel_res_specified) pcl::console::parse (argc, argv, "-v", voxel_resolution); float seed_resolution = 0.1f; bool seed_res_specified = pcl::console::find_switch (argc, argv, "-s"); if (seed_res_specified) pcl::console::parse (argc, argv, "-s", seed_resolution); float color_importance = 0.2f; if (pcl::console::find_switch (argc, argv, "-c")) pcl::console::parse (argc, argv, "-c", color_importance); float spatial_importance = 0.4f; if (pcl::console::find_switch (argc, argv, "-z")) pcl::console::parse (argc, argv, "-z", spatial_importance); float normal_importance = 1.0f; if (pcl::console::find_switch (argc, argv, "-n")) pcl::console::parse (argc, argv, "-n", normal_importance); ////////////////////////////// ////////////////////////////// ////// This is how to use supervoxels ////////////////////////////// ////////////////////////////// //////////// create instance as process 2//////////// pcl::SupervoxelClustering<PointT> super (voxel_resolution, seed_resolution); if (disable_transform) //////////// set param as process 3 //////////// super.setUseSingleCameraTransform (false); super.setInputCloud (cloud); super.setColorImportance (color_importance); super.setSpatialImportance (spatial_importance); super.setNormalImportance (normal_importance); //////////// pcd output as process 1 //////////// std::map <std::uint32_t, pcl::Supervoxel<PointT>::Ptr > supervoxel_clusters; pcl::console::print_highlight ("Extracting supervoxels!\n"); //////////// execute as process 4 //////////// super.extract (supervoxel_clusters); pcl::console::print_info ("Found %d supervoxels\n", supervoxel_clusters.size ()); pcl::visualization::PCLVisualizer::Ptr viewer (new pcl::visualization::PCLVisualizer ("3D Viewer")); viewer->setBackgroundColor (0, 0, 0); PointCloudT::Ptr voxel_centroid_cloud = super.getVoxelCentroidCloud (); viewer->addPointCloud (voxel_centroid_cloud, "voxel centroids"); viewer->setPointCloudRenderingProperties (pcl::visualization::PCL_VISUALIZER_POINT_SIZE,2.0, "voxel centroids"); viewer->setPointCloudRenderingProperties (pcl::visualization::PCL_VISUALIZER_OPACITY,0.95, "voxel centroids"); PointLCloudT::Ptr labeled_voxel_cloud = super.getLabeledVoxelCloud (); viewer->addPointCloud (labeled_voxel_cloud, "labeled voxels"); viewer->setPointCloudRenderingProperties (pcl::visualization::PCL_VISUALIZER_OPACITY,0.8, "labeled voxels"); PointNCloudT::Ptr sv_normal_cloud = super.makeSupervoxelNormalCloud (supervoxel_clusters); //We have this disabled so graph is easy to see, uncomment to see supervoxel normals //viewer->addPointCloudNormals<PointNormal> (sv_normal_cloud,1,0.05f, "supervoxel_normals"); pcl::console::print_highlight ("Getting supervoxel adjacency\n"); std::multimap<std::uint32_t, std::uint32_t> supervoxel_adjacency; super.getSupervoxelAdjacency (supervoxel_adjacency); //To make a graph of the supervoxel adjacency, we need to iterate through the supervoxel adjacency multimap for (auto label_itr = supervoxel_adjacency.cbegin (); label_itr != supervoxel_adjacency.cend (); ) { //First get the label std::uint32_t supervoxel_label = label_itr->first; //Now get the supervoxel corresponding to the label pcl::Supervoxel<PointT>::Ptr supervoxel = supervoxel_clusters.at (supervoxel_label); //Now we need to iterate through the adjacent supervoxels and make a point cloud of them PointCloudT adjacent_supervoxel_centers; for (auto adjacent_itr = supervoxel_adjacency.equal_range (supervoxel_label).first; adjacent_itr!=supervoxel_adjacency.equal_range (supervoxel_label).second; ++adjacent_itr) { pcl::Supervoxel<PointT>::Ptr neighbor_supervoxel = supervoxel_clusters.at (adjacent_itr->second); adjacent_supervoxel_centers.push_back (neighbor_supervoxel->centroid_); } //Now we make a name for this polygon std::stringstream ss; ss << "supervoxel_" << supervoxel_label; //This function is shown below, but is beyond the scope of this tutorial - basically it just generates a "star" polygon mesh from the points given addSupervoxelConnectionsToViewer (supervoxel->centroid_, adjacent_supervoxel_centers, ss.str (), viewer); //Move iterator forward to next label label_itr = supervoxel_adjacency.upper_bound (supervoxel_label); } while (!viewer->wasStopped ()) { viewer->spinOnce (100); } return (0); } void addSupervoxelConnectionsToViewer (PointT &supervoxel_center, PointCloudT &adjacent_supervoxel_centers, std::string supervoxel_name, pcl::visualization::PCLVisualizer::Ptr & viewer) { vtkSmartPointer<vtkPoints> points = vtkSmartPointer<vtkPoints>::New (); vtkSmartPointer<vtkCellArray> cells = vtkSmartPointer<vtkCellArray>::New (); vtkSmartPointer<vtkPolyLine> polyLine = vtkSmartPointer<vtkPolyLine>::New (); //Iterate through all adjacent points, and add a center point to adjacent point pair for (auto adjacent_itr = adjacent_supervoxel_centers.begin (); adjacent_itr != adjacent_supervoxel_centers.end (); ++adjacent_itr) { points->InsertNextPoint (supervoxel_center.data); points->InsertNextPoint (adjacent_itr->data); } // Create a polydata to store everything in vtkSmartPointer<vtkPolyData> polyData = vtkSmartPointer<vtkPolyData>::New (); // Add the points to the dataset polyData->SetPoints (points); polyLine->GetPointIds ()->SetNumberOfIds(points->GetNumberOfPoints ()); for(unsigned int i = 0; i < points->GetNumberOfPoints (); i++) polyLine->GetPointIds ()->SetId (i,i); cells->InsertNextCell (polyLine); // Add the lines to the dataset polyData->SetLines (cells); viewer->addModelFromPolyData (polyData,supervoxel_name); }
参考サイト
・Open3D・Open3D+ROS+Pythonで3次元画像処理を楽々プロトタイピング
・ROSでPCLのサンプルを動かす - supervoxel clustering